








 Construccion de un robot CSP20 completo
Construccion de un robot CSP20 completo
El caso que nos ocupa es el del robot CSP 20, el cual es un microbot del tipo CD-BOT que puede funcionar de forma autónoma o controlada.
Este proyecto es una modificación del original, el cual se encuentra en:
http://www.jvmbots.com/
DESCRIPCION
En la forma autónoma CSP 20 se comporta como un robot explorador y se apoya en sus sensores para no colisionar con el entorno y en la forma controlada el robot es controlado con un mando de TV Standard.
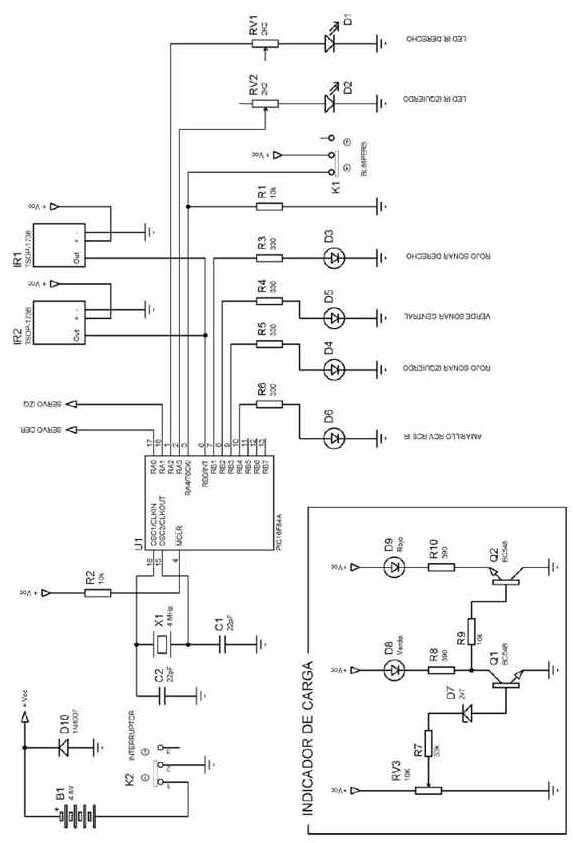
El cerebro del robot es un microcontrolador PIC16F84A. Los sensores y motores de CSP 20 se apoyan en este chip para localizar obstáculos y evitarlos o para decodificar los comandos que se le envían desde el mando IR.
FUNCIONAMIENTO AUTONOMO
El robot esta dotado de dos diodos emisores de IR en su parte delantera los cuales emiten destellos de luz a una frecuencia de 38Khz. Cuando dichos destellos son reflejados por un obstáculo son recogidos por el receptor situado en la parte central, en el centro de los bumpers.
El micro controlador detecta la cantidad de impulsos recogidos procedentes de cada LED emisor y así traza su ruta evasiva. Cuando el robot no ve el obstáculo porque es demasiado pequeño, por ejemplo una pata de una silla o un perfil muy fino, tiene los bumpers que hacen que el robot retroceda unos centímetros y gire 90º hacia una dirección diferente.
FUNCIONAMIENTO COMANDADO
El programa comandado utiliza el protocolo estándar de PHILLIPS RC5. Utilizando un mando de TV, utilizo los 8 botones para controlarlo. Cuatro de estos botones realizan las funciones de forma rápida y los otros cuatro realizan las mismas funciones pero de forma mas lenta y precisa.
Por ejemplo se puede girar o avanzar y retroceder de milímetro en milímetro.
Los bumpers actúan de la misma forma que lo hacían en el modo autónomo.
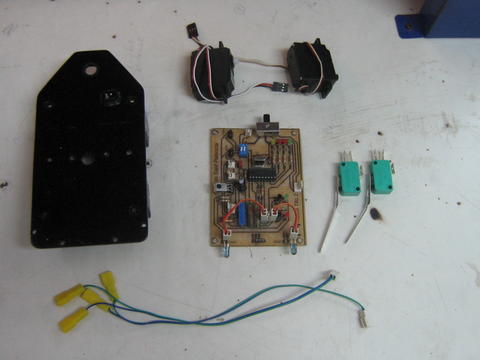
MATERIALES
2- Servos futaba S3003 (previamente trucados)
2- Diodos emisores de IR de 5mm.
2- Receptores IR de tipo TSOP1736
1- Porta pilas de 4 pilas del tipo AA
4- Pilas recargables tipo AA
3- Leds rojos de 3mm.
2- Leds verdes de 3mm.
1- Led amarillo de 3mm
1- Zócalo de 18Pin
1- PIC16F84A
2- BC548C
1- Cristal de cuarzo de 4Mhz
1- Diodo 1N4007
1- Diodo zener de 2,7v
1- Condensador electrolítico de 47uF/25v
2- Condensadores de poliéster de 22pf
3- Resistencias de 10K 1/4w
2- Resistencias de 390 ohm 1/4w
4- Resistencias de 330 ohm 1/4w
1- Resistencia de 33K 1/4w
2- Resistencias ajustables horizontales pequeñas de 2K2
1- Resistencia ajustable horizontal pequeña de 10K
Varios: Pins y terminales para el cableado.
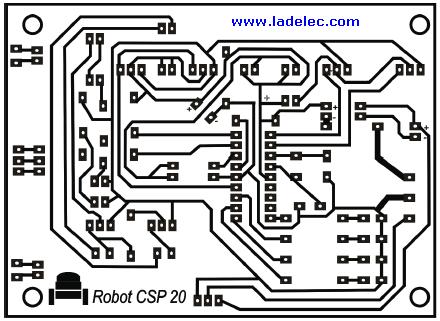
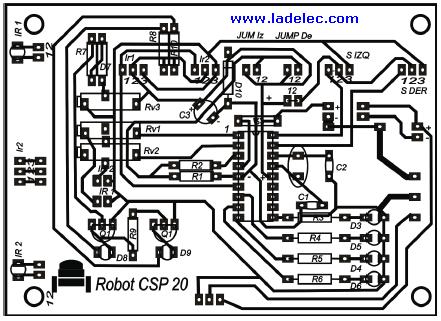
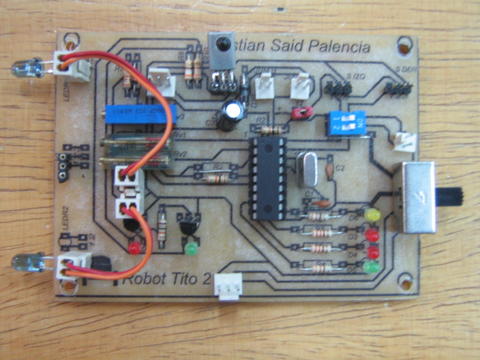
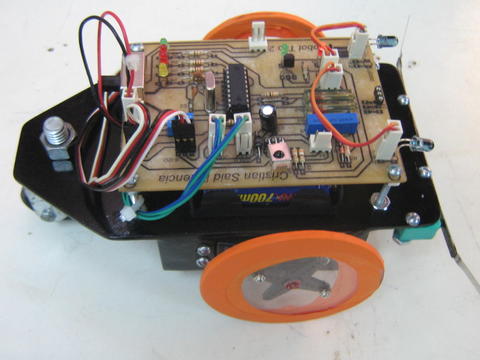
Circuito Impreso e imágenes del robot:
Fuente: http://www.ladelec.com

El coste basico para un Robot seria lo siguiente:
* Programador TE20: 15/20 € ( para programar el Chip )
* Chip ó Microcontrolador PIC 16F84A: 7 € ( para empezar )
* 1 Cristal de Cuarzo – 4 Mhz: 1 €
* Electronica variada: 10 € aprox. ( resistencias x3, pulsado reset, condesadores 22 pf x2, conectores de voltaje IN/OUT, Regulador tension LM7805 x1 )
* Placa pre-estrañada y perforada: 3 € ( 15×15 cm ejemp. )
* 2 Servos de Aeromodelismo de 3.2 Kg.: 15 € unidad
* Ruedas de goma x2: 4 € las dos
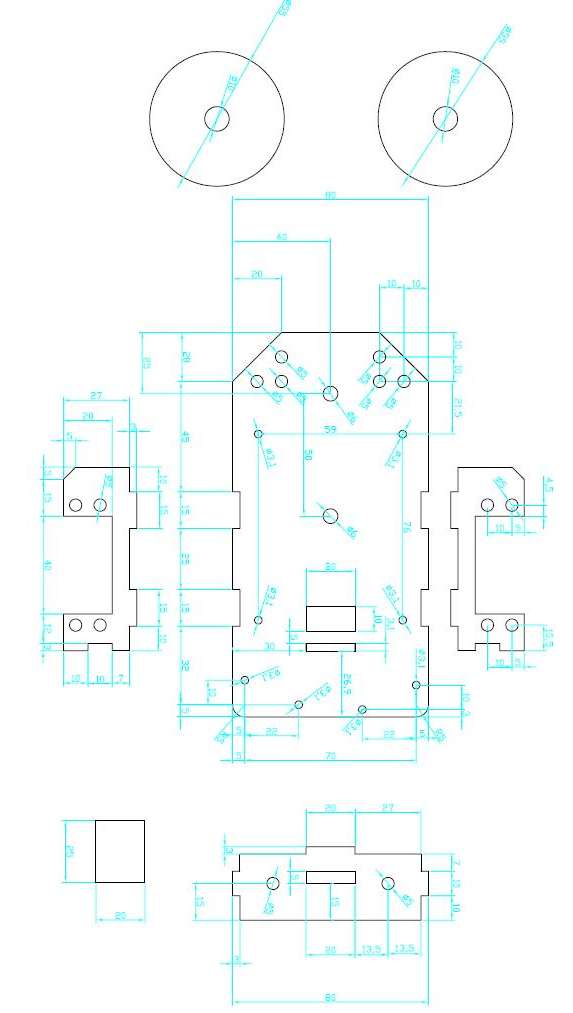
* Chasis… se lo podemos hacer con PVC, Policarbonato, Aluminio, etc.
* Soldador de no mas de 40 watios, Yo recomiendo 15/20 Watios
* Estaño de mucha plata y poca resina ![]()
|
|


 | 21 septiembre 2009 en Electronica | tags: Electronica |









